
No code data science
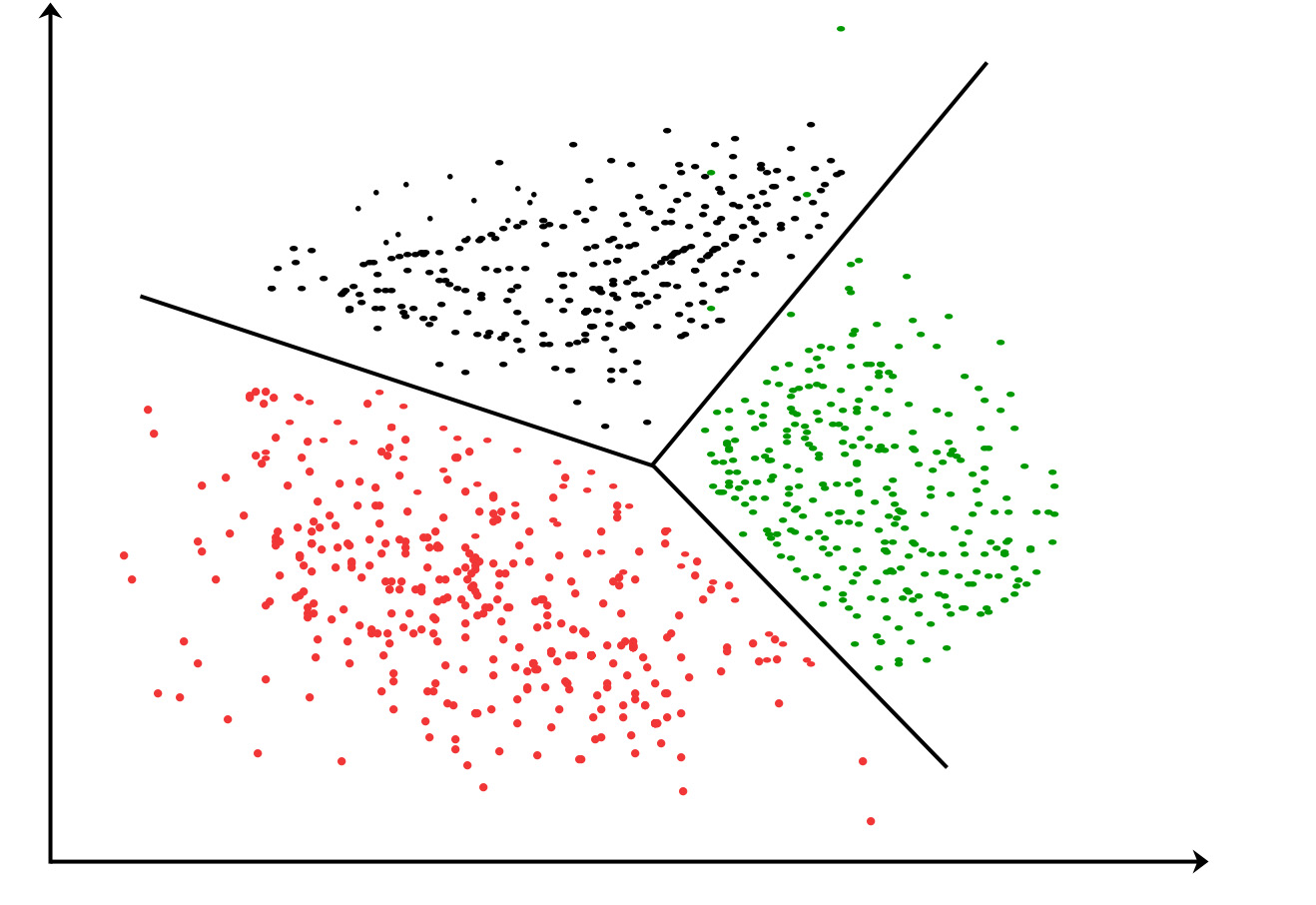
Unsupervised Machine Learning: K-Means Clustering
Having discussed in detail supervised machine learning algorithms, we focus on an unsupervised machine learning algorithms: K-Means clustering.